GNSS / GPS localization
How do Sensolus trackers use GNSS technology for localization?
GNSS is a localization technology where the tracker uses satellites to determine its location. Currently the most used system is the GPS system. It provides geolocation and time to a GPS receiver anywhere on earth.
GNSS localization explained
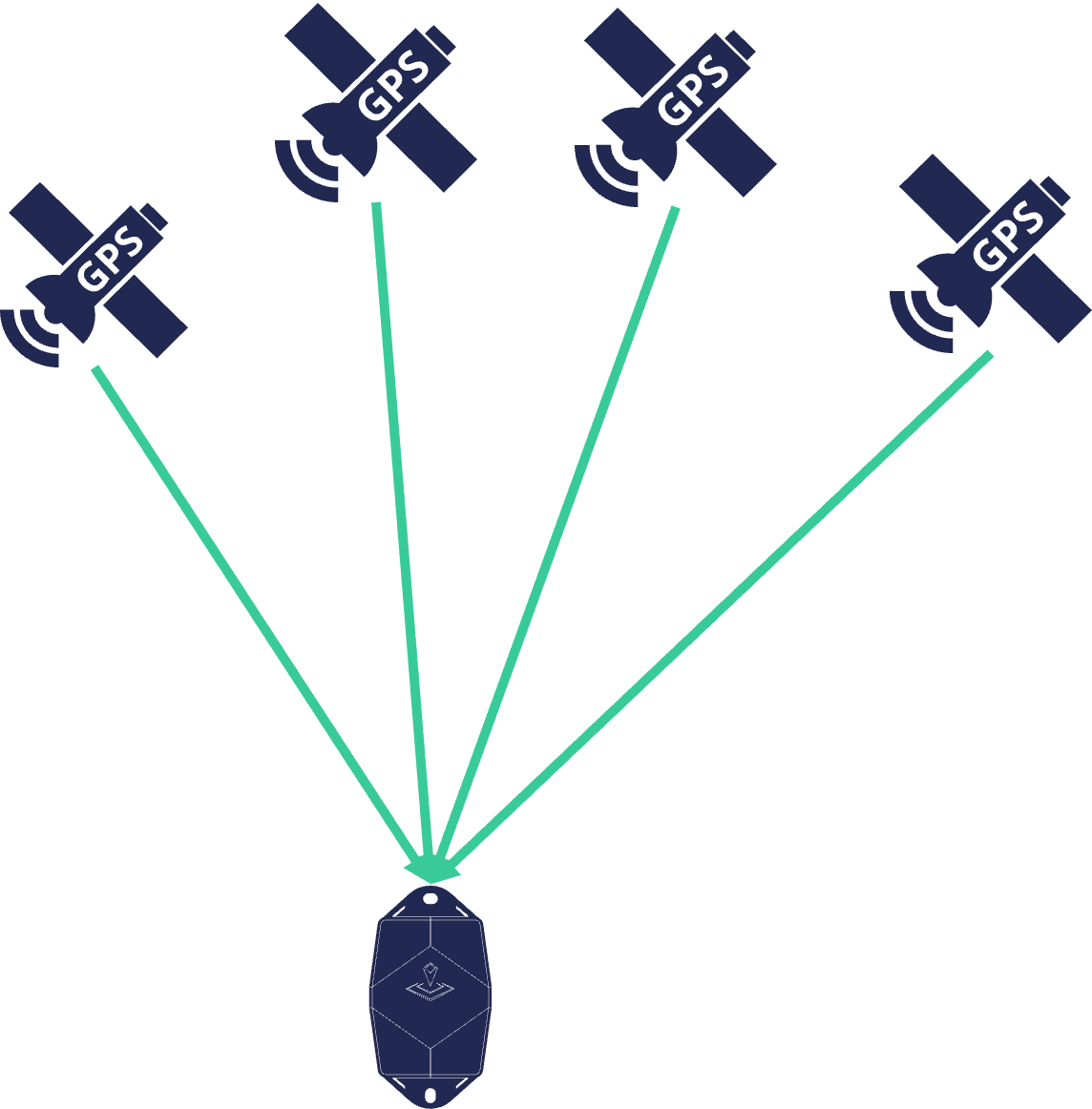
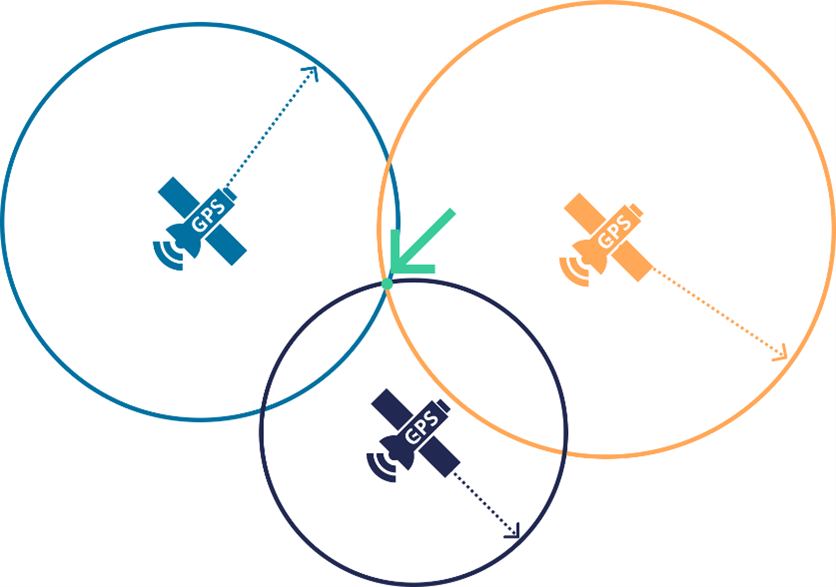
All GNSS localization uses similar concepts, that are further explained below applied to the GPS technology. GPS uses a constellation of satellites that circulate the globe in different orbits. Each satellite transmits its precise current time and information of its position in the sky. By combining the time and position data of at least 3 different satellites, a device with a GPS receiver can triangulate its position, as visualized in the figure below:
The accuracy of satellite based localization is influenced by several factors.
- Satellite geometry: ideally satellites are well spread across the horizon. Using too many satellites in the same sector increases the error margin.
- Signal obstacles: the best GPS environment is outdoors, where the receiver has no obstacles. In a dense urban environment this is often not the case. GPS signals can also get reflected by buildings or walls (multipath). This will decrease the precision.
- Atmospheric conditions: water and snow in the air can weaken the GPS signal. Snow or ice on the tracker itself has a similar effect.
Improving GPS accuracy
GPS accuracy generally improves by allowing more time for the tracker to listen to satellites. This way, the tracker can find additional satellites beyond the minimum of 3 and it can average locations over time. These techniques are leveraged on specialized measuring gear and smartphones. However, in the context of a tracker optimized for minimizing power consumption, this is not desirable.
The tracker has two parameters which are used to tune the GPS behavior: (1) required target accuracy and (2) maximum fix time. The first parameter is the target accuracy number in meters. If we configure the tracker with a target accuracy of 20m, it means that we want at least a 50% chance that the accuracy is 20m or below. This is based on the concept of the Circular Error Probable (CEP) which is used in ballistics as a measure of a weapon's system precision.
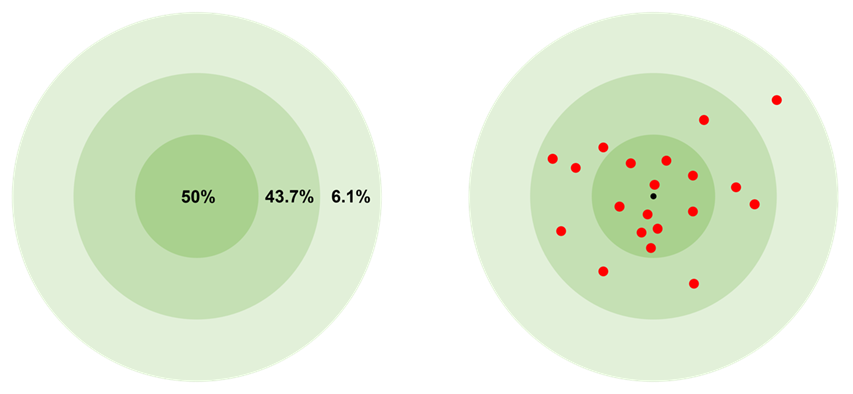
The picture on the left shows the 50% target in the dark green circle. The right-hand side shows how 10 hits will be in the target while 10 will be outside. The hits will follow a normal distribution around the central impact point. The second parameter is the maximum fix time parameter. It indicates how long the tracker should scan for satellites. Making this very long increases the chance to succeed in an accurate GPS fix, but it has a severe impact on battery life if the maximum threshold is hit very often. .
Making a GPS location fix
To acquire a GNSS location the tracker scans for GNSS satellites until the accuracy is better than a specified threshold (for example: 250 m) or the maximum fix time (For example: 200 s) has been reached.
The tracker halts the localization attempt when the accuracy requirement is still not met after the maximum fix time. In case the accuracy is better than the acceptance threshold (For example: 250 m) it will send a degraded fix location message. If none of these requirements are met, it will send a failed fix message or, if defined in the location sequence, start initiating another geolocation method. The different options are summarized in the table below.
| Successful fix | Degraded fix | Failed fix | |
|---|---|---|---|
| Accuracy Requirement | Within accuracy requirement |
Accuracy between accuracy requirement and accuracy acceptance |
Accuracy higher than acceptance |
| Live result in cloud platform |
Location + accuracy |
Location + lower accuracy |
network location + accuracy |
| Recovered result in cloud platform |
Location + accuracy |
Location + lower accuracy | no location |
Saving battery consumption: indoor detection
Indoor detection is a firmware parameter that can be enabled via remote settings. When the parameter is enabled, the tracker will abort GNSS positioning when it estimates that the chance of a successful fix is too low based on the number of observed satellites. This time is called the indoor detection time (For example: 30s). This parameter should be activated when the tracker is not only used in outside environments but also inside buildings and is configured to use GNSS.
Advantages and disadvantages of GPS localization
| Advantages | Disadvantages |
|---|---|
|
|
Trackers with GNSS/GPS localization functionality
On the list with Sensolus trackers you can see which tracking devices contain the GNS/GPS localization functionality.